


自动驾驶系统安全保证高效策略:基于定量风险规范与预防性安全的融合方法
本文聚焦自动驾驶系统(ADS)安全保证的核心挑战,提出融合定量风险规范(QRN)与预防性安全(PcS)的创新方法论。通过构建运行设计域(ODD)完整性框架、引入基于损失事件频率的量化安全要求,以及增强态势感知(SAW)模型以连接定量安全指标与运行时决策,系统性解决传统安全保证方法在复杂系统中的适应性难题。研究成果为自动...
基于视觉语言模型、反应式规划器与行为树的机器人实时故障处理统一框架
本文提出一种创新的机器人实时故障处理统一框架,融合视觉语言模型(VLMs)、反应式规划器及行为树(BTs),通过执行前验证与反应式故障处理相结合,实现对意外障碍物、传感器误差等复杂场景的自适应应对。框架利用场景图进行结构化环境感知,结合执行历史跟踪技术,支持上下文敏感的动态调整,可在 peg 插入、物体分拣等真实任务及...

面向 ADAS/AVs 的模型驱动安全案例敏捷开发框架 —— 基于 SysML V2 与动态 GSN 论证
本文聚焦自动驾驶系统安全工程领域,提出一种创新的基于模型工程与仿真的安全案例敏捷构建方法。通过 SysML V2 建模语言实现系统设计与安全分析的全生命周期融合,利用驾驶场景仿真开展早期验证,结合目标结构化表示法(GSN)动态生成安全案例,有效解决高级驾驶辅助系统(ADAS)和自动驾驶汽车(AVs)在复杂场景下的安全目...

基于深度学习的智能车辆健康管理系统:AI 驱动诊断从故障预测到主动维护的全生命周期解决方案
深度学习正在重塑汽车工程领域的预测性车辆健康诊断,通过分析高维传感器数据、优化维护策略和预防故障来提升可靠性。本文深入探讨了卷积神经网络 (CNNs)、循环神经网络 (RNNs) 和 Transformer 架构在实时故障检测、异常预测和根本原因分析中的应用。结合数字孪生技术、边缘计算和深度强化学习,实现主动维护干预和...

ML FMEA:面向安全关键系统的机器学习故障模式与影响分析框架
探索机器学习安全新范式! 本文提出 ML FMEA 框架,创新性融合过程故障模式分析(PFMEA)与机器学习开发流程,针对汽车自动驾驶、医疗等高风险场景,提供从数据预处理到模型部署的全生命周期风险评估方案。预填充模板支持开发团队系统化识别 20 + 类故障模式(如数据偏差、概念漂移),并配套 15 项标准化缓解措施。适...
基于视觉语言模型、反应式规划器与行为树的机器人实时故障处理统一框架
本文提出一种创新的机器人实时故障处理统一框架,融合视觉语言模型(VLMs)、反应式规划器及行为树(BTs),通过执行前验证与反应式故障处理相结合,实现对意外障碍物、传感器误差等复杂场景的自适应应对。框架利用场景图进行结构化环境感知,结合执行历史跟踪技术,支持上下文敏感的动态调整,可在 peg 插入、物体分拣等真实任务及...

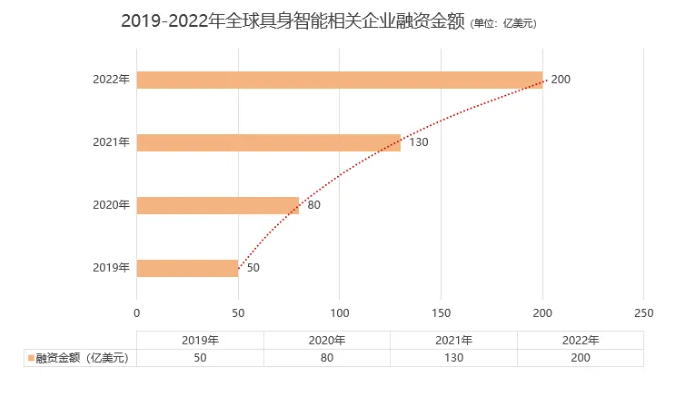
我国具身智能重点城市布局情况与创新路径解析
我国具身智能重点城市布局情况与创新路径解析
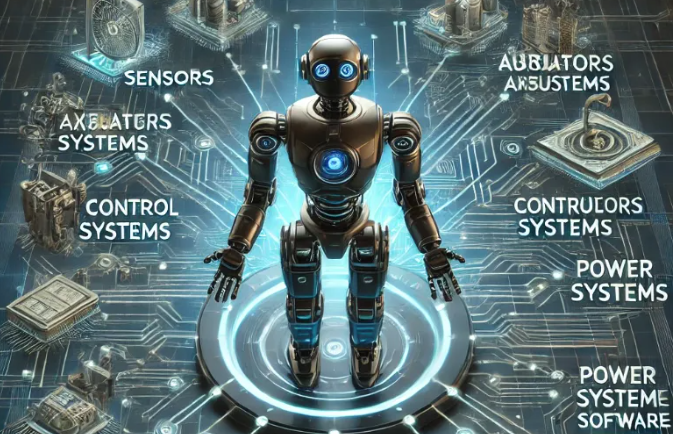
具身智能产业全景剖析:从技术底座到产业生态
具身智能与通用AI有着本质的区别。通用AI旨在构建能够处理各种复杂任务、具备广泛知识和推理能力的智能系统
具身智能产业演进:历史溯源与当下格局之思
让我们带着这些疑问,一同探索具身智能的“前世今生”,揭开它神秘的面纱,展望它为我们带来的无限可能。

具身多模态大模型:开发、数据集与未来趋势解析(下)
具身多模态大模型(EMLM)是融合语言、视觉、触觉等多模态数据与物理交互能力的前沿 AI 系统,由广东人工智能和数字经济实验室等机构牵头研究。本文系统梳理 EMLM 技术体系,剖析 PaLM-E、RT-1 等典型模型及 Open X-Embodiment、Habitat-Sim 等数据集,重点探讨跨模态对齐、实时决策等...
基于深度学习的智能车辆健康管理系统:AI 驱动诊断从故障预测到主动维护的全生命周期解决方案
深度学习正在重塑汽车工程领域的预测性车辆健康诊断,通过分析高维传感器数据、优化维护策略和预防故障来提升可靠性。本文深入探讨了卷积神经网络 (CNNs)、循环神经网络 (RNNs) 和 Transformer 架构在实时故障检测、异常预测和根本原因分析中的应用。结合数字孪生技术、边缘计算和深度强化学习,实现主动维护干预和...

思科 2025 AI 安全报告:72% 企业存漏洞,提示注入与数据投毒成首要威胁
思科《2025 年 AI 安全现状》报告揭示:72% 企业部署 AI 但仅 13% 具备安全防护能力,AI 基础设施攻击(如 NVIDIA 容器工具包漏洞)、供应链投毒(Sleepy Pickle 技术)、提示注入 / 越狱攻击(DeepSeek R1 攻击成功率 100%)成三大核心威胁。研究显示,0.01% 数据投...

AI 反馈循环危机:当机器以错误为食,如何避免商业决策陷入 “谎言螺旋”?
本文深入探讨 AI 反馈循环风险:当 AI 系统基于其他模型输出数据训练时,错误会被持续放大,形成 “AI 幻觉”(如虚构信息、偏差预测),并在金融、医疗、电商等领域引发误诊、信任流失等严重后果。文中解析错误累积机制,提出使用多样化数据、人类监督(HITL)、定期审计及 AI 错误检测工具等缓解策略,强调在 AI 透明...

公共安全 "围墙花园" 暴露美国数据隐私危机:AI 工具垄断下的误判风险与联邦立法缺失
本文揭露美国公共安全领域 "围墙花园"(封闭数据系统)如何加剧数据隐私危机:自动车牌识别器、预测警务软件等 AI 工具在缺乏透明度与监管的情况下,由私营企业垄断数据访问与分析,导致执法机构陷入供应商锁定、数据碎片化及潜在公民权利侵犯。文中对比欧美数据治理差异,指出美国联邦立法缺失下的监管真空,呼吁构...

【技术革命】从机器人到智能大脑:代理式 AI 如何通过模块化架构实现企业效率 100 倍跃升
探索代理式 AI 如何从模仿人类大脑神经元协作到重塑企业效率!本文解析代理式 AI 的模块化、可扩展及抗脆弱特性,揭示其在医疗、金融、保险等行业突破重复性任务瓶颈的核心优势。结合平台化架构的四大要素(数据、模型、代理、治理),阐述企业如何通过低代码工具、跨云兼容框架实现多代理智能的无缝扩展,应对生成式 AI 之后的下一...

两年3万+缺口!汽车功能安全工程师究竟长什么样?
功能安全工程师的工作内容有哪些专业比较匹配该岗位功能安全工程师岗位如何快速入门功能安全工程师的日常工作协作关系功能安全工程师的发展前景功能安全工程师的上升通道功能安全工程师需要掌握的技能以及工作难点1功能安全工程师的工作内容功能安全工程师主要实在功能安全经理和项目经理的管理和指导下,完成产品功能安全设计、开发和验证。
弥合人工智能代理鸿沟:跨越自主能力光谱的实施困境与突破路径
本文深入剖析了人工智能代理实施现状,通过对超 1250 个开发团队的调查数据,揭示了计划构建复杂代理工作流程与成功生产部署之间的巨大差距。详细阐述了从 L0 到 L5 的自主能力框架,分析各自主级别面临的技术挑战、技术栈考量及实施现实。还探讨了开发方法、未来方向和技术路线图,为人工智能开发者提供了极具价值的实践指导与深...

AlphaDrive:华中科技大学 - 地平线联合提出强化学习框架,突破自动驾驶 VLM 规划瓶颈(MetaAD 提升 22%)
华中科技大学联合地平线提出 AlphaDrive 框架,创新性结合强化学习与推理技术,突破自动驾驶 VLM 规划瓶颈。通过 GRPO 算法与四种定制奖励(规划准确性 / 动作加权 / 多样性 / 格式),在 MetaAD 数据集上实现横向决策 F1 提升 22%、纵向决策 F1 提升 18%。采用 SFT+RL 两阶段...

Chameleon:清华 - 博世联合提出快 - 慢神经符号框架,突破无地图自动驾驶车道拓扑提取精度(OpenLane-V2 提升 22%)
清华大学联合博世研发的 Chameleon 框架,创新性提出快 - 慢神经符号推理架构,突破自动驾驶无地图场景下的车道拓扑提取难题。通过动态合成程序的快速系统处理常规车道关系,结合 GPT-4 视觉模型的慢系统解决极端路口场景,在 OpenLane-V2 数据集上实现车道段检测 DETIs 提升 22%、邻接矩阵预测 ...

Occ-LLM:基于运动分离 VAE 的大模型架构,突破自动驾驶 4D 占用预测精度极限(港科大广州)
香港科技大学广州分校最新研究提出 Occ-LLM 框架,创新性融合大语言模型与 3D 语义占用表示,突破传统自动驾驶感知瓶颈。通过运动分离变分自动编码器(MS-VAE)有效解决动态 / 静态场景分离难题,在 nuScenes 数据集上实现 4D 占用预测 IoU 提升 6%、mIoU 提升 4%。支持多任务协同:未来 ...

“舱驾一体”渐行渐近,“好用”的车载AI芯片该如何设计与定义?
“舱驾一体”渐行渐近,“好用”的车载AI芯片该如何设计与定义?
智能网联汽车多域电子电气架构会如何发展?
本文总体车载软件架构设计、硬件系统、通信系统和软件系统四个角度对ICV多域E/E架构研究的关键技术进行了深入分析,并展望了未来的发展趋势。

详解智能座舱通信技术
本文主要介绍了智能座舱通信技术相关内容。

汽车网络安全及相关标准 | 你的智能座驾有多脆弱?
基于简单的案例分析和标准介绍,得出除了车厂必须保证所设计的车辆系统的安全性,还有其他能减少“表面攻击”的工作要做。智能汽车的出现为技术和创新的无限可能性打开了大门,但也为汽车本身以外的威胁打开了大门。

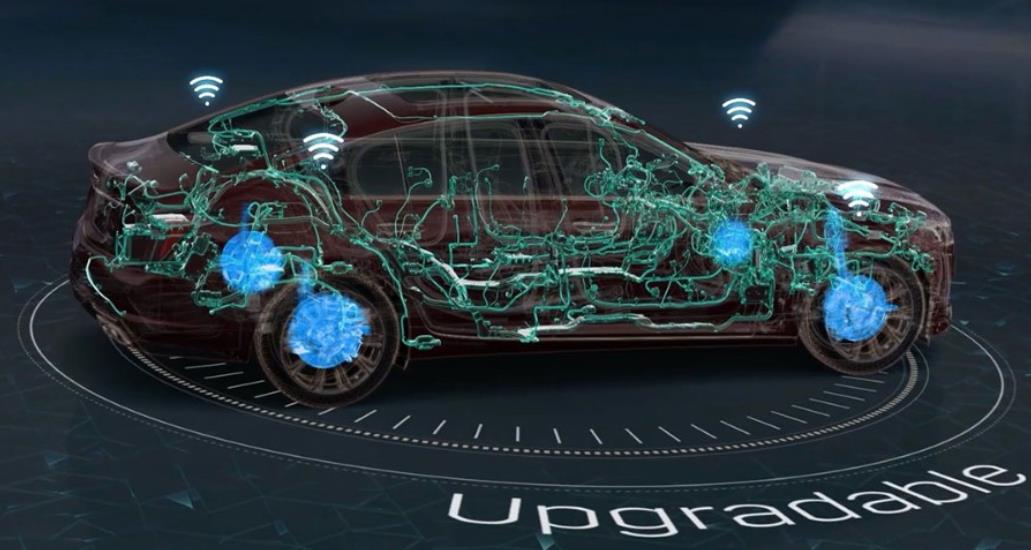
软件定义汽车:可扩展模块化出行解决方案框架
本文回顾了 SOA 的基本原理及其在 SDV 中的应用,揭示其如何提升灵活性、加速迭代并降低生产成本。
基于AUTOSAR实现带行人检测的自动紧急制动碰撞预警系统
本文阐述了一项复杂的创新技术——带行人检测功能的自动紧急制动碰撞预警系统(CWAB-PD

【汽车软件】AUTOSAR:适用于时序保护机制的任务调度方法
本文针对汽车领域的实时操作系统规范AUTOSAR提出了一种时间保护机制,以便在调度实时任务时遵守每个任务的截止时间。
【汽车软件】基于AUTOSAR的系统快速原型设计
本文提出了一种在AUTOSAR系统中自动集成不符合AUTOSAR的原型代码的概念,以及特定于应用程序的配置和完整系统的生成。

AP AUTOSAR :平台健康管理 PHM 详解 (下)
本文详细介绍了 AP AUTOSAR :平台健康管理 PHM的相关内容。
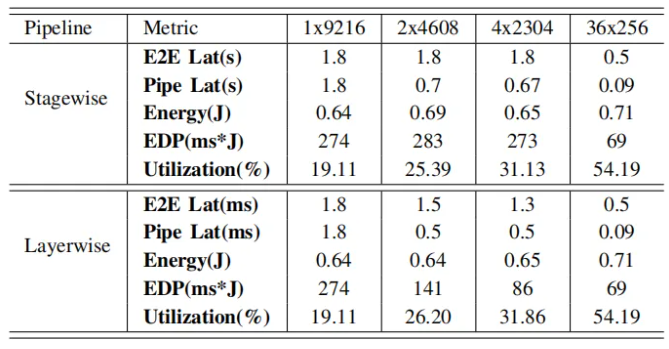
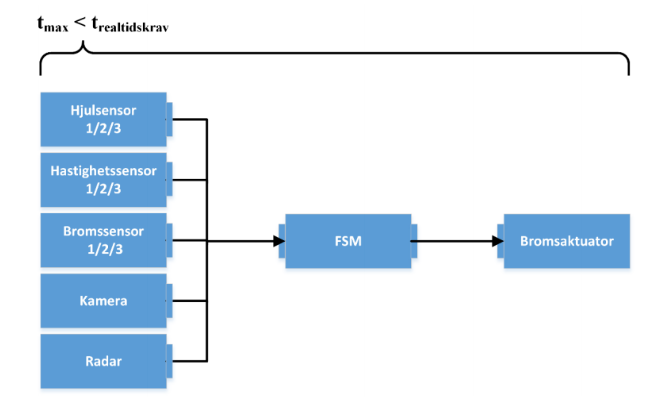
多芯片神经处理单元对自动驾驶感知的性能影响
摘要我们研究了新兴的基于chiplet的神经处理单元在受限的汽车环境中加速车载人工智能感知工作负载的应用。其动机源于chiplet技术如何成为新兴车载架构的重要
IAR 环境下的 FlashLoader 设计
本文介绍了基于 IAR 的 Flash Loader 设计关键点。
ECU 的车规级试验:DV 试验(一:标准概述)
本文初步介绍了 ECU 的车规级试验即 DV 测试,包括什么是 DV 测试,DV 与 PV 的关系,相关的试验标准等

一文了解ECU硬件都有什么
本文介绍了ECU硬件,包括其组成和作用,与此强相关的传感器,执行器和电源管理模块等内容。 希望对您的学习有所帮助。

解密汽车嵌入式芯片CPU、MCU、SBC
本文针对CPU,MCU,SBC这些基本的芯片概念进行阐述。
自动驾驶系统安全保证高效策略:基于定量风险规范与预防性安全的融合方法
本文聚焦自动驾驶系统(ADS)安全保证的核心挑战,提出融合定量风险规范(QRN)与预防性安全(PcS)的创新方法论。通过构建运行设计域(ODD)完整性框架、引入基于损失事件频率的量化安全要求,以及增强态势感知(SAW)模型以连接定量安全指标与运行时决策,系统性解决传统安全保证方法在复杂系统中的适应性难题。研究成果为自动...
面向 ADAS/AVs 的模型驱动安全案例敏捷开发框架 —— 基于 SysML V2 与动态 GSN 论证
本文聚焦自动驾驶系统安全工程领域,提出一种创新的基于模型工程与仿真的安全案例敏捷构建方法。通过 SysML V2 建模语言实现系统设计与安全分析的全生命周期融合,利用驾驶场景仿真开展早期验证,结合目标结构化表示法(GSN)动态生成安全案例,有效解决高级驾驶辅助系统(ADAS)和自动驾驶汽车(AVs)在复杂场景下的安全目...
ML FMEA:面向安全关键系统的机器学习故障模式与影响分析框架
探索机器学习安全新范式! 本文提出 ML FMEA 框架,创新性融合过程故障模式分析(PFMEA)与机器学习开发流程,针对汽车自动驾驶、医疗等高风险场景,提供从数据预处理到模型部署的全生命周期风险评估方案。预填充模板支持开发团队系统化识别 20 + 类故障模式(如数据偏差、概念漂移),并配套 15 项标准化缓解措施。适...

ISO 26262/21434 驱动的软件 DFMEA 增强:RPM 与 HAZOP 集成破解 RPN 高风险排序难题
本文提出基于 ISO 26262 与 ISO 21434 的软件 DFMEA 增强框架,针对传统风险优先数(RPN)在复杂系统中的排序缺陷,创新性引入风险优先矩阵(RPM)与危险与可操作性分析(HAZOP)集成方案。通过嵌入式 LiDAR 系统案例验证,该方法使 ADAS 风险评估准确性提升 30%,并助力 Karma...

自动驾驶系统安全分析中危险场景识别的概念框架与机器学习融合方法
本文聚焦自动驾驶系统(ADSs)安全分析领域,深入探讨危险场景识别的概念性方法,解析运行设计域(ODD)、功能安全(FuSa)、预期功能安全(SOTIF)等核心技术框架,揭示基于场景分析方法在未知风险识别中的挑战。创新性提出将机器学习(ML)融入危险分析与风险评估(HARA)的技术路径,为解决高度自动驾驶系统的道路安全...


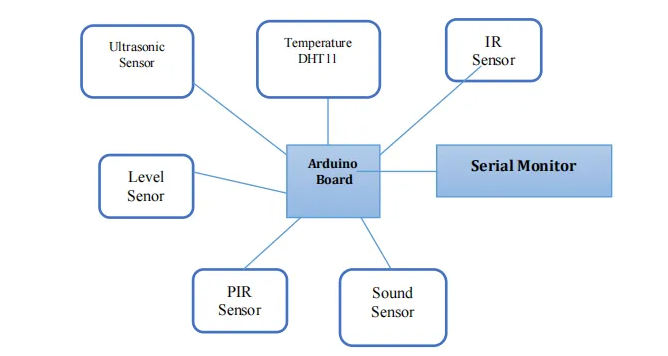
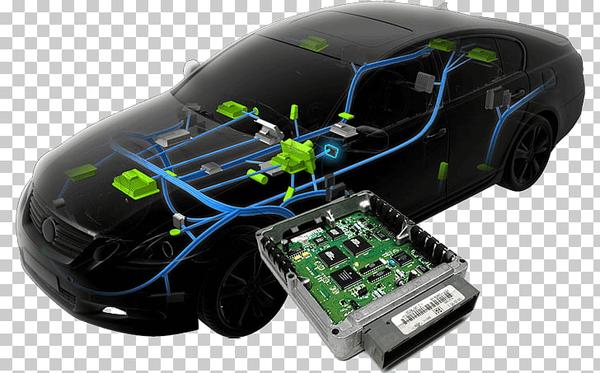
汽车应用中基于非CAN和CAN的基础通信研究与原型实现
本文重点研究早期汽车应用中使用的非 CAN 系统,以及 Arduino 等开源硬件和 MCP 2515 等 CAN 控制器
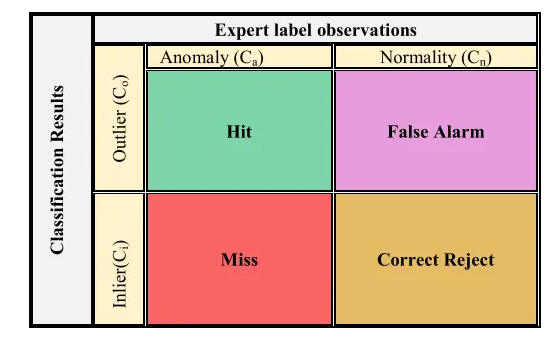
基于机器学习的CAN总线网络攻击检测智能安全框架
本文提出一种新的基于改进的一类支持向量机的 CAN 流量异常检测模型
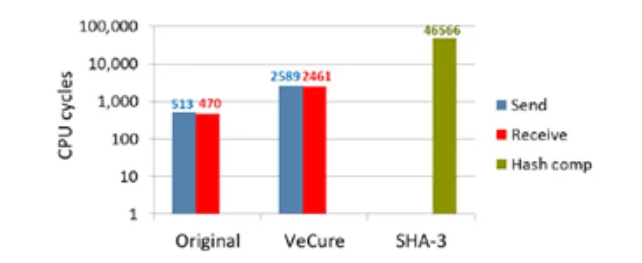
车载网络通信“CAN总线”的安全与漏洞
本研究的目的是调查CAN总线协议在安全通信方面的当前局限性,以及汽车领域的研究人员为克服CAN总线在不同层面的局限性所提供的各种解决方案。
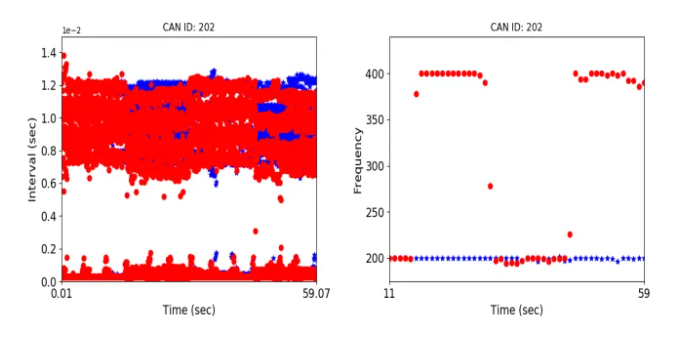
基于车辆行驶模式下恒定CAN消息频率的汽车入侵检测
本文提出了一种简单且经济高效的方法,通过在车辆不同行驶模式下保持恒定的消息频率来确保 CAN 总线的安全。
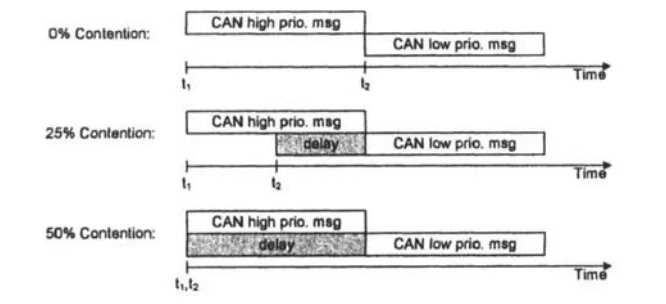
抽象通信建模:以汽车CAN总线为例
本文报告了一项案例研究,其中汽车通信协议控制器局域网(CAN)在不同的抽象级别进行了建模,协议的特定功能(如位填充)在模型中有的被体现,有的被抽象掉